當(dāng)前市面上的旋轉(zhuǎn)定位和速度反饋裝置的種類(lèi)日益增加。選型已不再是使用編碼器還是旋轉(zhuǎn)變壓器的問(wèn)題了。大量的問(wèn)題令人疑惑不解。首先就是“該用絕對(duì)式還是增量式?”、“該用磁感應(yīng)式還是光電感應(yīng)式?”。其次,市場(chǎng)上還有廠商提供電容式和電感式原理的編碼器,我也應(yīng)該考慮么?我需要商用、工業(yè)用、重載、極重載還是超重載型?回答完所有這些問(wèn)題是否就萬(wàn)事大吉了呢?
選擇旋轉(zhuǎn)變壓器時(shí)你還要知道尺寸、速度、電氣接口。而選擇編碼器時(shí),你還要知道分辨率、安裝、輸出和連接方式。我們將考察每一種編碼器的反饋類(lèi)型直至其核心技術(shù),以及它們是如何用于你的應(yīng)用的。不過(guò),你的應(yīng)用才是出發(fā)點(diǎn),而更了解它的人莫過(guò)于你自己,所以所選產(chǎn)品的好壞最終還是取決于你自己。我們也會(huì)在表中突出一些關(guān)鍵技術(shù)參數(shù),從而你就可以根據(jù)你的應(yīng)用、交叉參考不同的反饋設(shè)備類(lèi)型。
增量編碼器
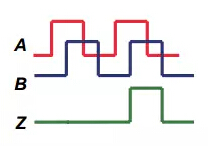
增量編碼器依賴(lài)于外部電路根據(jù)編碼器產(chǎn)生的計(jì)數(shù)計(jì)算位置。增量編碼器的輸出形式可以為單方波(A)、正交方波(A和B,可判斷旋轉(zhuǎn)方向)、或帶索引或每圈一個(gè)脈沖的正交方波(A、B和Z)。采用正交方波判斷旋轉(zhuǎn)方向的方法常被稱(chēng)為“正交法”。
增量信號(hào)的發(fā)生機(jī)構(gòu)常常被視為編碼器的引擎。編碼器有兩種最主要的引擎:光電式和磁式。為得到良好的輸出兼容性,兩種引擎都需要進(jìn)行類(lèi)似的傳感器對(duì)準(zhǔn)。
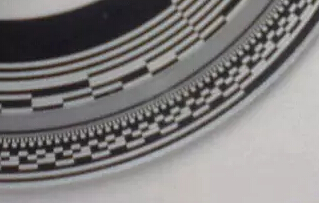
在光電編碼器中,光由LED產(chǎn)生并由一個(gè)芯片級(jí)傳感器進(jìn)行檢測(cè)。兩者之間為一個(gè)碼盤(pán),通常由玻璃、金屬或塑料制成。在增量編碼器中,在碼盤(pán)的圓周上蝕刻、鍍覆或沖壓(如果是金屬)有精密的柵格。磁性編碼器包括一個(gè)磁柵鼓或磁柵盤(pán)、一個(gè)磁阻傳感器和一個(gè)調(diào)節(jié)電路板。磁柵盤(pán)或磁柵鼓已被磁化且具有許多極。磁柵盤(pán)或磁柵鼓轉(zhuǎn)動(dòng)時(shí),傳感器將磁場(chǎng)的正弦變化轉(zhuǎn)化為電信號(hào)。該電信號(hào)進(jìn)而通過(guò)調(diào)節(jié)電路的乘除或插補(bǔ)處理產(chǎn)生合適的方波輸出。
增量編碼器一直引領(lǐng)著速度反饋領(lǐng)域的潮流,目前還沒(méi)有衰落的跡象。增量編碼器是所有旋轉(zhuǎn)反饋裝置中最廣泛使用的類(lèi)型。憑借簡(jiǎn)單的硬件電路和軟件設(shè)計(jì),能夠接收增量式編碼器輸入的設(shè)備隨處可見(jiàn)。你會(huì)發(fā)現(xiàn)驅(qū)動(dòng)器、面板式儀表、計(jì)時(shí)器和PC卡都具有增量編碼器接口。光電編碼器常見(jiàn)于辦公室環(huán)境應(yīng)用(如復(fù)印機(jī))和工業(yè)應(yīng)用(如自動(dòng)引導(dǎo)車(chē)(AGV))。磁性編碼器常用于惡劣環(huán)境中,如高架起重機(jī)、工程車(chē)輛和造紙廠等,而在這些應(yīng)用下光電編碼器的性能可能會(huì)大幅降低。
絕對(duì)值編碼器
絕對(duì)值編碼器通過(guò)一定的方法能得到相應(yīng)設(shè)備旋轉(zhuǎn)的確切角度。絕對(duì)值編碼器使用一種獨(dú)特的二進(jìn)制圖案,這種圖案在旋轉(zhuǎn)時(shí)不會(huì)重復(fù),因此可向編碼器指示絕對(duì)屬性。裝置即使斷電,改變旋轉(zhuǎn)位置仍會(huì)反映其輸出。如果編碼器還帶有可追蹤旋轉(zhuǎn)圈數(shù)的齒輪組,它就變成了一個(gè)多圈編碼器。
在光電絕對(duì)式編碼器中,磁柵盤(pán)在LED和傳感器之間轉(zhuǎn)動(dòng),按照磁柵盤(pán)的圖案,光要么能夠透過(guò)磁柵盤(pán)進(jìn)而被傳感器接收,要么被磁柵盤(pán)擋住。最終,通過(guò)這種方式編碼器能夠在數(shù)字信號(hào)的每一位產(chǎn)生“開(kāi)或關(guān)”。在保證制造精度和理想的應(yīng)用環(huán)境下,光電編碼器具有所有反饋方式中分辨率和精度都是最高的。Dynapar光電絕對(duì)式編碼器每圈計(jì)數(shù)點(diǎn)大于4百萬(wàn),具有36弧秒的精度。
絕對(duì)位置的傳輸可通過(guò)多種方式。最初的絕對(duì)式反饋裝置使用并行數(shù)據(jù)傳輸位置信號(hào)。在并行數(shù)據(jù)中,每一個(gè)二進(jìn)制數(shù)字由獨(dú)立的導(dǎo)線傳輸,然后由控制器進(jìn)行解讀。后來(lái)出現(xiàn)了串行編碼器,其絕對(duì)位置與時(shí)鐘脈沖同步傳輸。SSI(同步串行接口)是一種最常見(jiàn)的串行編碼器協(xié)議。BiSS編碼器可對(duì)時(shí)鐘脈沖進(jìn)行控制從而進(jìn)行雙向通信。
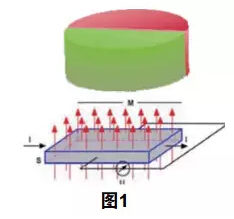
在磁性絕對(duì)式編碼器中,絕對(duì)信息可通過(guò)在傳感器網(wǎng)格上方轉(zhuǎn)動(dòng)磁體得到,見(jiàn)圖1。這種傳感器通常為霍爾效應(yīng)芯片或磁阻感應(yīng)電路。
絕對(duì)式或增量式編碼器對(duì)使用環(huán)境的要求大同小異。不過(guò)絕對(duì)值編碼器在世界范圍內(nèi)正越來(lái)越多地被采用,因?yàn)殡S著設(shè)計(jì)越來(lái)越復(fù)雜,機(jī)器往往需要進(jìn)行多軸同步并更加高效安全地運(yùn)行。增量編碼器須依賴(lài)額外的設(shè)備(如限位開(kāi)關(guān))才能在功能上實(shí)現(xiàn)精確的位置反饋。
旋轉(zhuǎn)變壓器

與編碼器類(lèi)似,旋轉(zhuǎn)變壓器也是將機(jī)械運(yùn)動(dòng)轉(zhuǎn)化為電子信號(hào)的轉(zhuǎn)動(dòng)式機(jī)電裝置。但與編碼器不同的是,旋轉(zhuǎn)變壓器傳輸?shù)氖悄M信號(hào)而非數(shù)字信號(hào)。基本組成方面,旋轉(zhuǎn)變壓器由1個(gè)一次繞組和2個(gè)相位在機(jī)械上成90°的二次繞組組成,見(jiàn)圖2所示。旋轉(zhuǎn)變壓器的輸出信號(hào)需要控制器能夠轉(zhuǎn)換模擬信號(hào)的信號(hào)輸入電路。
旋轉(zhuǎn)變壓器的參數(shù)之一為磁極數(shù)。圖3為單轉(zhuǎn)速旋轉(zhuǎn)變壓器的輸出。磁極數(shù)等于旋轉(zhuǎn)變壓器轉(zhuǎn)動(dòng)一圈的已調(diào)幅正弦周期數(shù)。多級(jí)旋轉(zhuǎn)變壓器是通過(guò)在轉(zhuǎn)子和定子中相等地增加磁極數(shù)來(lái)實(shí)現(xiàn)的。最大轉(zhuǎn)速受旋轉(zhuǎn)變壓器的尺寸影響,一般用來(lái)提高精度。而一個(gè)單轉(zhuǎn)速旋轉(zhuǎn)變壓器本質(zhì)上是一個(gè)低精度的單圈絕對(duì)式裝置。隨著轉(zhuǎn)速輸出的增加,旋轉(zhuǎn)變壓器也會(huì)失去絕對(duì)位置信息。如果空間允許,在一個(gè)多轉(zhuǎn)速旋轉(zhuǎn)變壓器上再加一個(gè)單轉(zhuǎn)速旋轉(zhuǎn)變壓器可既可提高精度,又可獲得絕對(duì)位置輸出。

由于具有和電機(jī)相似的結(jié)構(gòu)(繞組、疊片、軸承和支架),旋轉(zhuǎn)變壓器可用于超重載應(yīng)用。因?yàn)椴粠щ娐酚布軌蛟诟訕O端的溫度下運(yùn)行。因?yàn)椴粠Ч鈱W(xué)元件以及不需精密對(duì)準(zhǔn),它能耐受更多的沖擊和振動(dòng)。因?yàn)椴粠Ч鈱W(xué)元件和電路硬件,它能夠用于高輻射環(huán)境。
旋轉(zhuǎn)變壓器傳感器的工業(yè)應(yīng)用:通常使用伺服電機(jī)和伺服驅(qū)動(dòng)器與旋轉(zhuǎn)變壓器配合來(lái)實(shí)現(xiàn)角速度與位置測(cè)量的應(yīng)用包括:數(shù)控(CNC)和注塑機(jī)、升降機(jī)、機(jī)械手臂、電動(dòng)交通工具(電動(dòng)自行車(chē)、電動(dòng)滑板車(chē)、電動(dòng)輪椅等)、鐵路運(yùn)輸、農(nóng)業(yè)和建筑設(shè)備、公共汽車(chē)和重型卡車(chē)、高爾夫球車(chē)和低速電動(dòng)車(chē)。

結(jié)束語(yǔ)
總之,應(yīng)根據(jù)應(yīng)用來(lái)選擇旋轉(zhuǎn)變壓器或編碼器反饋。控制電路和環(huán)境是兩個(gè)最重要的考慮因素—找到了這兩個(gè)問(wèn)題的答案,選什么就很清楚了。
文章來(lái)源:網(wǎng)絡(luò)









 聯(lián)系我們
聯(lián)系我們 CRM系統(tǒng)
CRM系統(tǒng) 在線服務(wù)
在線服務(wù) 官方微信
官方微信
