摘要:本文主要介紹EP3E伺服驅動器在6關節工業機器人在機床上下料的應用方案及電氣解決方案,通過測試驗證,本伺服可很好的達到6軸機器人的應用指標。
一、概述
現今在很多零件的數控機床加工過程中,要把第一工序加工完的零件先取下,然后以剛加工完面作為定位基準在同一工作臺的另一工裝上或另一上完成第二工序加工。通常要把零件翻轉和旋轉一定角度后,再平移裝到另一工裝上加工,如此依序完成整個零件的全部加工。有時多個加工中心是在一字擺放,有時為省空間而面對面擺放或二種擺放的任意組合。有的加工用同一種機床,也有用不同類型機床完成整個零件的加工。這時零件從一個工裝到另一個工裝上裝卡時,必須被翻轉和旋轉。在被翻轉和旋轉的同時,其位置也要變化。這時應用的方式是把一個6軸關節機器人安裝在大型直線運動軌道上,就很好解決上述工藝動作,在人力成本日益增加的時代,這項技術廣泛應用于機床上下料及搬運等各行業,隨著先進制造技術的發展,6軸機器人將有非常好的發展前景,但當前市場上6軸機器人往往采購國外高端伺服系統,導致其價格高居不下,利用邁信的EP3E伺服驅動器及電氣部分可以很好控制價格,并可穩定高效運行,達到高性價比的工業機器人行業解決方案,在降低了生產成本同時提高了生產效率,增加競爭優勢。
二、工業6軸機器人與機床
本項目中6軸機器人機械本體是用川崎成熟的機械本體,如圖1所示,可實現三維空間內高精度拾放作業,具有精度高、可靠性好、易用性強的特點,可用于裝配、搬運、焊接、噴涂、裝箱等作業領域。在面對國內還在發展階段的工業機器人用戶來說,一個工業機器人的使用首先考慮到的是成本,如果所需成本高于目前用人力的成本太多的話,就會造成6軸工業機器人在市場上難以推廣的境地,但使用邁信推出的高性能總線式伺服驅動EP3E配上貝加萊的X20控制器通過EthernetPowerLink總線就很好解決6軸機器人性能及價格問題。
機床是HEADMANT55,數控系統為SIEMENSSINUMERIK828D,目前其主要工藝是銑削伺服電機盒的端面。數控機床與控制器之間的配合通訊為IO信號來觸發,這樣可以快捷方面完成機器人與機床之間上下料的配合動作,如圖2所示。
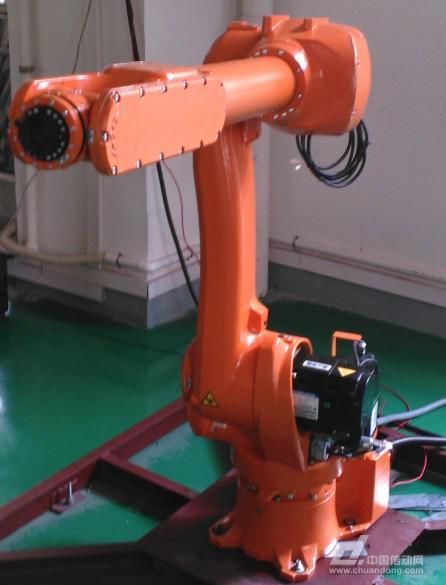
圖1、6軸機器人本體
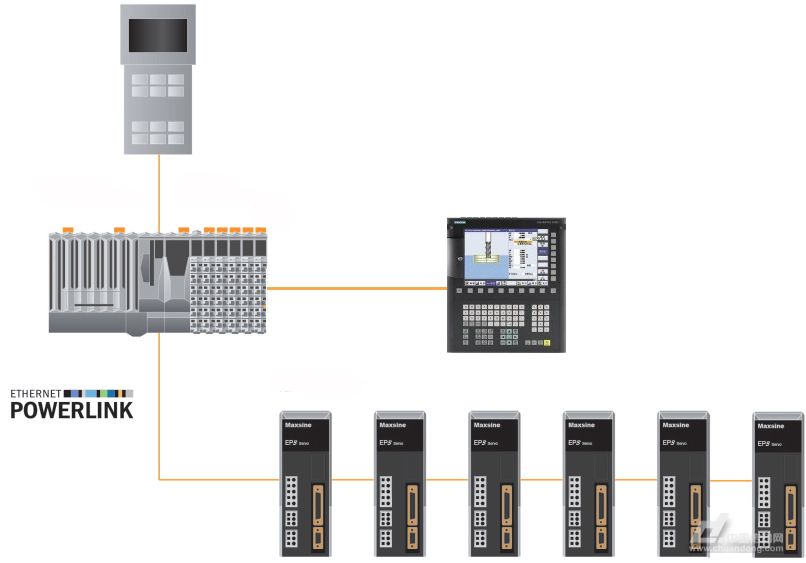
圖2、6軸機器人控制系統組成圖

圖3、6軸機器人控制柜與示教器
三、控制系統
6軸工業機器人由貝加萊X20控制器作為上位控制器,PowerLink總線式EP3E伺服驅動器,示教器之間通過EthernetPowerLink總線連接起來高速、穩定地運行,如上圖3所示。
1、高性能的上位控制系統
貝加萊X20控制器將PLC、運動控制、測量技術和機器人正反解算法集成在同一個控制平臺上,可以實現在通用的機器人上的應用,達到換工業機器人本體不換控制系統的靈活配置,在多功能應用、收回利用等方面具備有一定的優勢。同時貝加萊的EthernetPowerLink總線技術低抖動性并很好地優化PLC與運動控制之間的同步,從而提高系統的精度和速度。
2、高性價比的伺服驅動器
EP3E伺服驅動器是武漢邁信電氣技術有限公司推出的國內首家支持EthernetPowerLink總線型的伺服驅動器之一,可以實現與貝加萊上位的PowerLink總線完美兼容,能夠發揮PowerLink的最佳性能。EthernetPowerLink是一項開源技術,是自動化領域的工業實時以太網之一。EP3E內部集成一個雙口Hub用于伺服驅動器的級聯,支持任意網絡拓撲的組合。
EP3E系列伺服驅動器,可以達到100Mbps的通信速率,節點傳輸距離為100m,伺服驅動器刷新速度最快為100us循環周期,使伺服驅動器具備高速的實時響應能力;EP3E伺服驅動器配套17bit單圈或者多圈編碼器(也可以選配20bit單圈或多圈編碼器),可以從容應對高速高精度定位,無軸同步傳動,電子齒輪,電子凸輪等應用。
3、EP3E通訊特性:
通訊協議:CANopenoverPowerLink,DS301
通信循環時間:100us周期倍數
過程數據通道:2RxPDO,2TxPDO,32bytes/PDO
服務數據通道:1SDO
同步抖動:<1us
位置控制:100us
操作模式:
Profileposition Mode
Homing Mode
Cyclic Synchronous Velocity Mode
Cyclic Synchronous Position Mode
四、機器人性能評價
此款6軸機器人的性能要求指標主要是指機器人在抓取標準工件時,機器人本體運行穩定性,定位誤差在一定范圍內時的最大作業頻率。在實際機器人調試過程中,EP3E默認值時6軸機器人的電機有一些異響及使能制動延遲等問題,通過對EP3E的參數調整達到完美消除上述問題達到平穩運行,達到采用國外高端伺服系統的性能指標,這樣的結果完全可以證明EP3E有能力代替國外高端伺服系統。
五、結語
通過本次與機床的測試,邁信伺服驅動器EP3E與貝加萊控制器之間通過PowerLink總線實現數據通訊,完成六軸聯動、圓弧插補、多軸插補。充分驗證了EP3E高性能伺服系統的各項性能指標完全能夠滿足6軸機器人多伺服系統的嚴格要求,從而替代國外高端伺服系統,同時也實現機器人關鍵零部件的國產化,降低國內機器人整機廠商的生產成本,提供其產品在市場上的競爭力。









 聯系我們
聯系我們 CRM系統
CRM系統 在線服務
在線服務 官方微信
官方微信
